01
SAPIENS Humanoid Robot
Leading a team of 8 building EPFL's first full humanoid robot from the ground up. 22-DoF hardware build, a custom 16-DoF dexterous hand, RL-based locomotion, and VR teleoperation.
View project →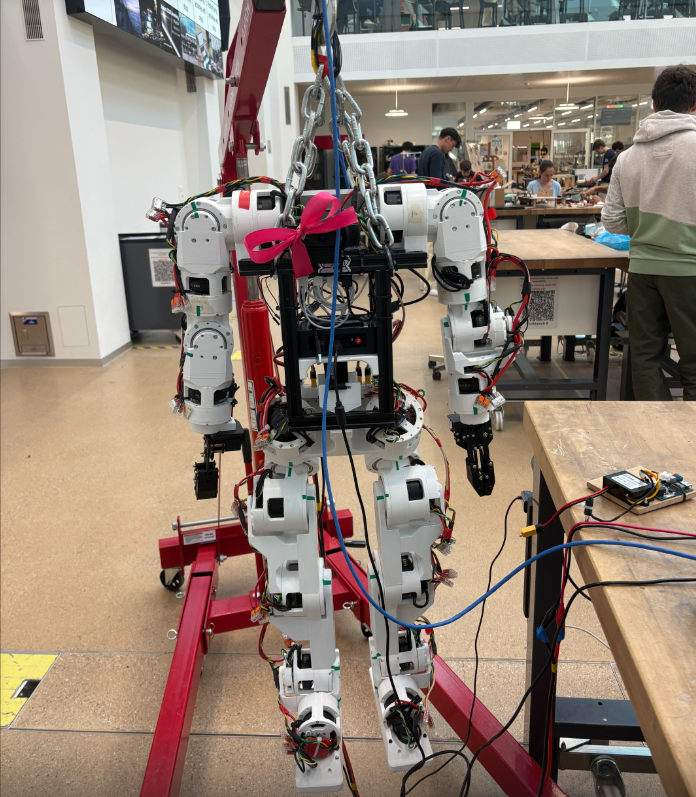
 JA
JAI build robots and space systems from concept to tested hardware, across the full stack: mechanical design, FEM, PCB, and ROS2 software. I'm an MSc Robotics student at EPFL.
Right now I'm leading the build of EPFL's first humanoid robot, designing a CubeSat qualification dispenser, and scouting early-stage startups as a student VC partner. When I'm not building, I love to travel and discover new places, cultures, and people.



Interested in the full stack, from mechanism design to autonomous robots.
Leading a team of 8 building EPFL's first full humanoid robot from the ground up. 22-DoF hardware build, a custom 16-DoF dexterous hand, RL-based locomotion, and VR teleoperation.
View project →Three years across Structure, Arm & Software. PETG+TPU wheel design and a unified ROS2 arm pipeline. Won 1st among 25 teams at the European Rover Challenge.
View project →
Payload Division Lead on Switzerland's first cryogenic bi-liquid rocket. Custom KiCad PCB, 3-camera system, and acoustic levitation experiment.
View project →
Redesigned a 3U qualification dispenser for vibration testing. Ansys modal analysis placed the first natural frequency at 2060.6 Hz, exceeding the ECSS requirement.
View project →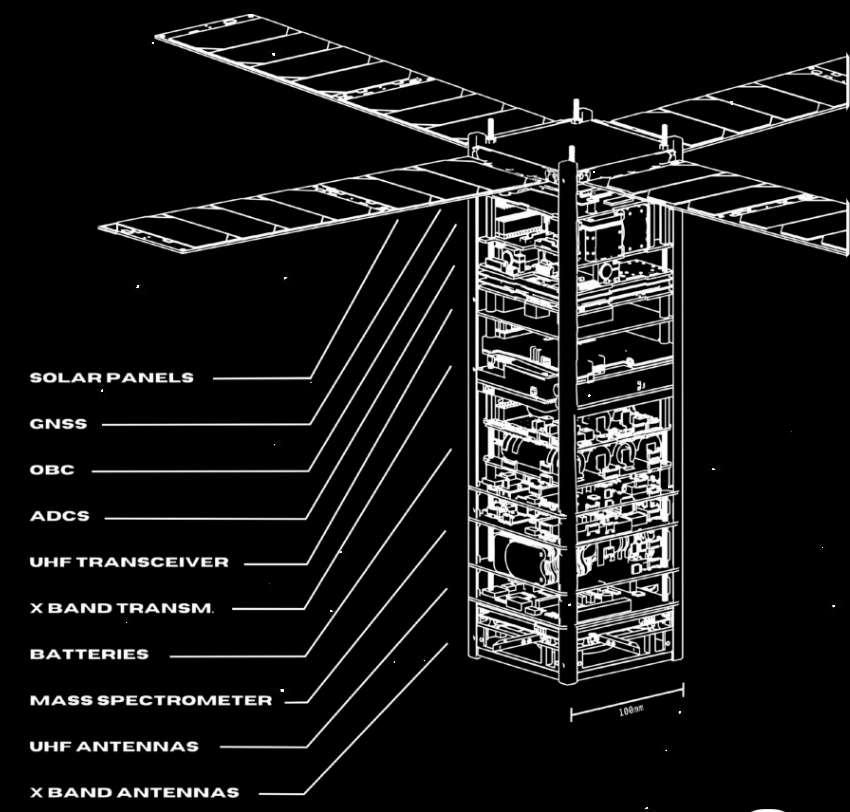
As one of five student partners, I scout and meet early-stage founders across EPFL and UNIL: 24 startups sourced and 15 founder interviews so far. I led an investment committee through to a yes on a student startup, and I write the memos behind our CHF 25k convertible-loan decisions.
I worked alongside the CEO through the close of a $40M seed round, building the investor data room, pitch decks, go-to-market materials, and grant applications that supported it.
I coached hundreds of students through the makerspace: 3D printing, laser cutting, machining, and soldering, helping them take their own projects from sketch to a working part.
I designed a flexure-guided angular inverter that cut angular error by 83%, validating the design through COMSOL FEM, laser-cut prototypes, and camera-based experiments.
My first hands-on workshop role: turning, milling, drilling, and welding parts straight from technical drawings.